
Video Friday is your weekly selection of awesome robotics videos, collected by your friends at IEEE Spectrum robotics. We also post a weekly calendar of upcoming robotics events for the next few months. Please send us your events for inclusion.
IROS 2023: 1–5 October 2023, DETROIT
CLAWAR 2023: 2–4 October 2023, FLORIANOPOLIS, BRAZIL
ROSCon 2023: 18–20 October 2023, NEW ORLEANS
Humanoids 2023: 12–14 December 2023, AUSTIN, TEX.
Cybathlon Challenges: 02 February 2024, ZURICH, SWITZERLAND
Enjoy today’s videos!
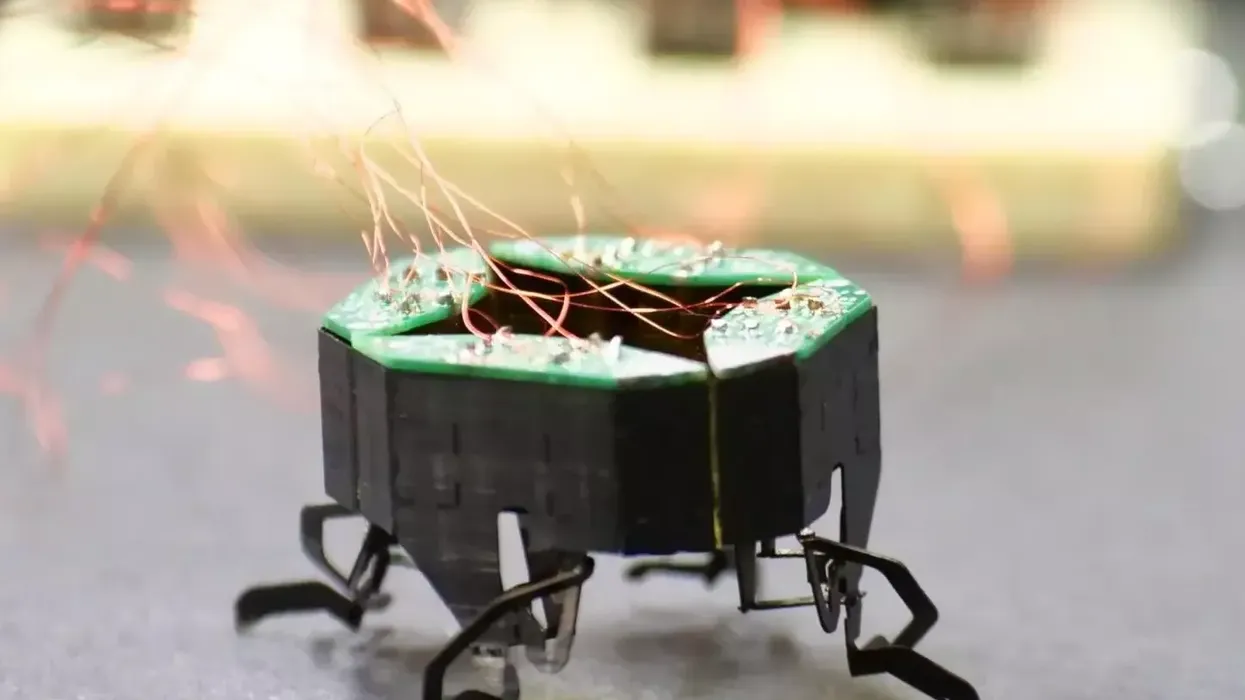
Engineers at CU Boulder have designed a new, tiny robot that can passively change its shape to squeeze through narrow gaps. The machine, named Compliant Legged Articulated Robotic Insect, or CLARI, borrows its inspiration from the squishiness and many shapes of the world of bugs.
[ CU Boulder ]
We’ve got a huge feature on UZH’s autonomous vision-based racing drones, which you should absolutely read in full after watching this summary video.
This is just CGI, but this research group has physical robots that are making this happen.
This video gives a preview of the recent collaboration between Cyberbotics Lab and Injury Biomechanics Research Lab (IBRL) at the Ohio State University on legged robot locomotion testing with the linear impactor.
[ Cyberbotics ]
This is our smallest swimming crawling version (SAW design). It is 6 centimeters long! The wave motion is actuated by a single motor. We attached floats as the motor and battery were too heavy.
[ Zarrouk Lab ]
A pair of Digits approaches a railway line, and you won’t believe what happens next!
[ Agility Robotics ]
Breakfast time with Reachy O_o
[ Pollen Robotics ]
Suction cups are necessary for all kinds of logistics robots, but they’re necessarily pretty fragile. Wouldn’t it be nice to have suction cups that heal themselves?
[ BruBotics ]
Thanks, Bram!
We present a simple approach to in-hand cube reconfiguration. By simplifying planning, control, and perception as much as possible, while maintaining robust and general performance, we gain insights into the inherent complexity of in-hand cube reconfiguration. The proposed system outperforms a substantially more complex system for cube reconfiguration based on deep learning and accurate physical simulation, contributing arguments to the discussion about what the most promising approach to general manipulation might be.
[ TU Berlin ]
Our latest AugRE developments for command, control, and supervision of autonomous agents in a three-operator/two-robot human-robot team. The views shown are the first-person views of three HoloLens 2 users and one top-down view of a satellite map with all team members visible throughout the entire demonstration.
[ UT ]
ABB robots go to White Castle.
[ ABB ]
In addition to completing tasks quickly and efficiently, agility allows legged robots to move through complex environments that are otherwise difficult to traverse. In “Barkour: Benchmarking Animal-level Agility with Quadruped Robots”, we introduce the Barkour agility benchmark for quadruped robots, along with a Transformer-based generalist locomotion policy
[ Google Research ]
This week, Geordie Rose (CEO) and Suzanne Gildert (CTO) muse about the idea of a “humanoid olympics” while discussing how humanoid robots and their respective companies can be ranked. They go over potential metrics for evaluating different humanoid robots–as well as what counts as a humanoid, what doesn’t, and why.
[ Sanctuary ]
Reference: https://ift.tt/dCJ5o2T



No comments:
Post a Comment